A tavaszi vetéshez kapcsolódó mini sorozatunk előző részében azt vizsgáltuk meg, hogy a talajhőmérséklet milyen hatással van a kukorica hozamára, ill. a korszerű, digitális mezőgazdasági megoldások hogyan tudnak segíteni az ideális vetési idő meghatározásában.
A precíziós-helyspecifikus növénytermesztés megjelenik a tavaszi vetésben is. Magától értetődő a kormányautomatikák használata – vetésről lévén szó RTK pontossággal, de elterjedt a sorelzárás és egyre többen érdeklődnek a tőszám szabályozott vetés iránt is, aminek éppen kukoricában lehet a legnagyobb jelentősége. Ezeknek az alkalmazásoknak közös pontja, hogy biztos műholdas helymeghatározásra van szükség. Nézzük meg, mit is jelent ez a gyakorlatban!
A műholdas helymeghatározás mára jól ismert, mindenki által használt technológia. Az elmélet azt mondja, ha egy háromdimenziós térben, 3 ismert ponttól való távolságunkat meg tudjuk mérni, akkor a pozíciónk meghatározható. A műholdas helymeghatározás esetén ezek az ismert pontok a műholdak, és az ezektől való távolságunkat határozzuk meg. Ezt pedig úgy tudjuk megtenni, hogy mérjük azt az időt, amíg a műholdak jele a vevőnkig elér. Mivel ez egy adott frekvenciájú rádiójel, ismerjük a terjedési sebességét, tehát az eltelt idő alapján a távolság meghatározható. De ha ez ennyire egyszerű, és csak 3 műholdat kell egyszerre látni a vevőnek, akkor miért kell erről egyátalán beszélni? Nos, azért, mert a gyakorlat azért sokkal bonyolultabb, mint az elmélet – valójában a nagy pontosságú helymeghatározáshoz sokkal több műhold egyidejű vételére van szükség. Egy RTK pontos GPS vevő esetén minimum 6 műhold kell, hogy a helymeghatározás elinduljon, majd a folyamatos működéshez is legalább 5. De mivel itt ún. differenciál műholdas helymeghatározásról van szó, amikor is a traktoron lévő vevőnk egy vagy több hozzánk közel lévő RTK bázisállomástól származó korrekciós jelet is használ, itt csak azok a műholdak számítanak, melyeket a bázisok és a mi vevőnk is lát. Így tehát itt már nyugodtan beszélhetünk 7-8 műholdról, mint minimális elvárásról. De még ez sem minden. A GPS vevők ugyanis nem használják minden műhold jelét, amelyet észlelni képesek. Ennek az az oka, hogy egyes műholdak jele olyan hibával terhelt, hogy nincs értelme figyelembe venni, mert rontana a helymeghatározás pontosságán. Ez jellemzően a nagyon lapos szögben látható műholdakra igaz, mert ezeknek a jele sokkal hosszabb utat tesz meg, így sokkal inkább érinti a légkör – elsősorban az ionoszféra és troposzféra – torzító hatása. A GPS vevők éppen ezért egy bizonyos szög (jellemzően 10°) alatt látott műholdak jelét automatikusan kizárják (1. ábra), de efölött is vannak minőségi paraméterek (pl. jel-zaj arány), melyeknek teljesülni kell, hogy az adott műhold jele figyelembevételre kerüljön. Ha ezt is figyelembe vesszük máris 10-12 műholdról beszélünk. És akkor még nem beszéltünk a domborzat, növényzet takaró hatásáról. Egy mélyebb völgy, egy fasor egyszerre több műholdat is kitakarhat. Az elméleti 3 db helyett tehát máris 12-14 műholdnál járunk, mint minimális műholdszám, ha stabil, RTK pontos helymeghatározásra van szükségünk.
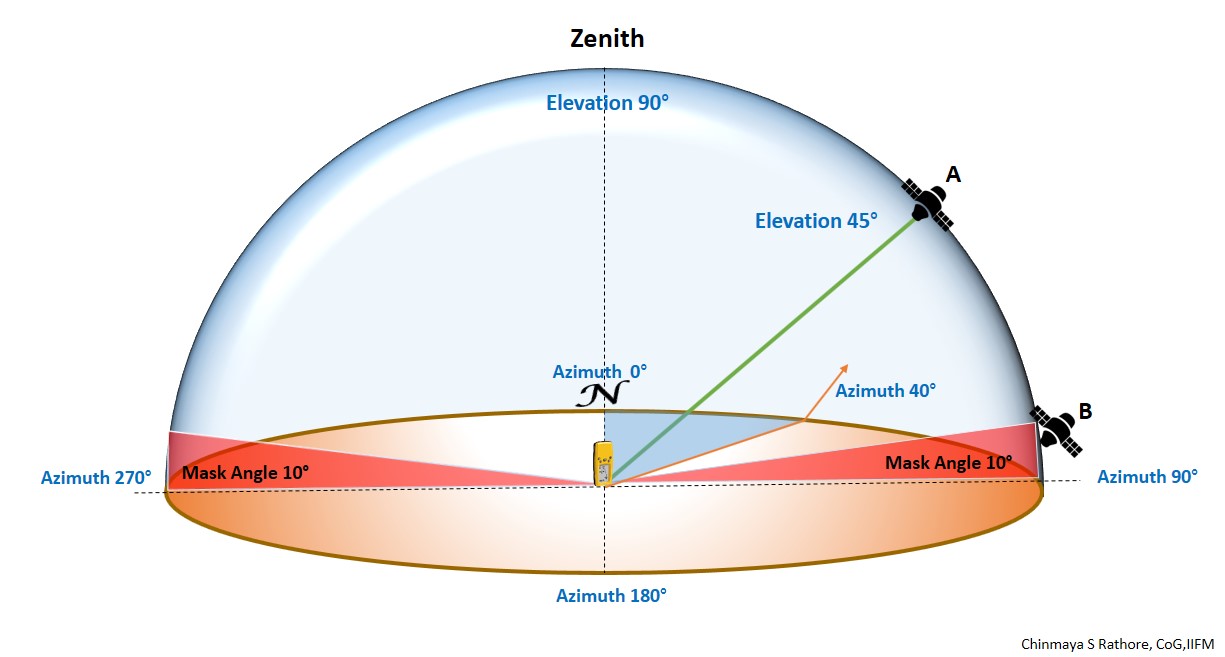
1. ábra: A magassági vágás (mask angle, vagy elevation mask) szerepe a műholdas helymeghatározásban
Itt jelenik meg a műholdvevők szerepe. Ma több olyan műholdas helymeghatározó rendszer is elérhető az amerikai GPS mellett, melyek jele hazánkban is fogható. Ilyen az orosz GLONASS, az európai Galileo, a kínai BeiDou. Az már a GPS vevő korszerűségén múlik, hogy ezek közül melyek vételére képes. Ma jellemzően az GPS + GLONASS vétel terjedt el a mezőgazdaságban, régebbi eszközök közül sok a csak GPS-t vevő. Ezzel szemben a kínálatban lévő Trimble mezőgazdasági GPS eszközök valamennyi műholdas rendszer jelét képesek venni (még a Japán QZSS-ét is).
Hogy mekkora ennek a jelentősége? A Trimble GNSS planning nevű alkalmazásában lehetőség van ellenőrizni, hogy adott helyen, adott időben hány műhold lesz elérhető. Próba kedvéért, mi most egy Szekszárd környéki területet választottunk ki véletlenszerűen. Beállítva a helyet, a tengerszint feletti magasságot, és a jellemző 10°-os vágási magasságot, leellenőriztük, hogy április 16-án melyik műholdas rendszer hány műholdja látható ezen a területen (2. ábra).
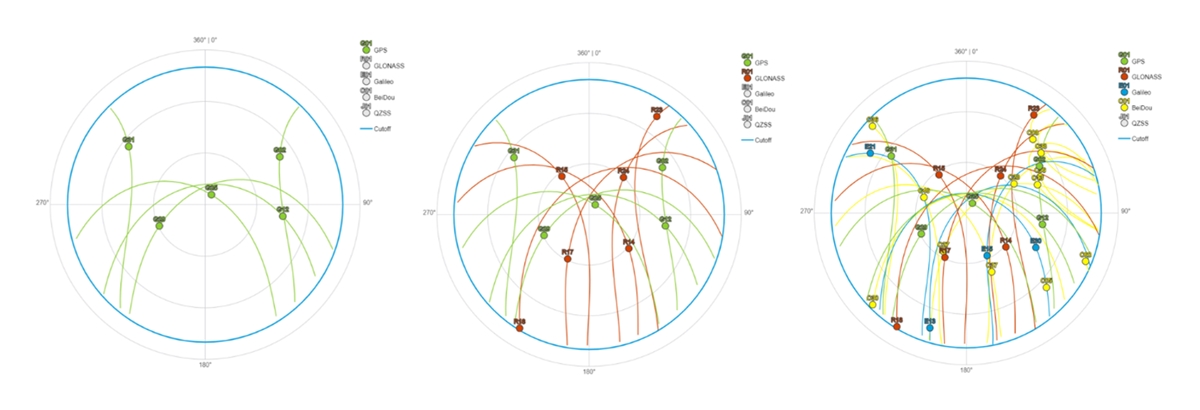
2. ábra: Elérhető műholdak a vizsgált helyen április 16-án, 13:40 perckor (csak GPS, GPS + GLONASS, GPS+GLONASS+Galileo+BeiDou)
A 2.ábra jól mutatja a több műholdas rendszer vételének előnyét. Van a napnak olyan időszaka, amikor GPS holdakból mindössze 5 látható az égen, és GLONASS-szal kiegészülve is csak 11 db (2. ábra, középső kép), de ezek közül is 2 db nagyon kedvezőtlen alacsony szögben. Ha itt még valamilyen árnyékoló hatás (domborzat, fasor) is jelentkezik, kérdésessé válhat az RTK helymeghatározás működése! Rosszabb esetben akár teljes jelvesztéshez vezethet (nem tud beállni az RTK fix állapot) és nem fog működni a GPS-es vezérlésünk. „Jobb” esetben az RTK fix állapot fennmarad, de megnő a helymeghatározás hibája. Illetve azzal, hogy a periférián lévő műholdak hol láthatóak, hol nem, ennek a hibának a mértéke is folyamatosan változik. A végeredmény – kacsázva, nagyobb hibával dolgozó kormányzás, pontatlanabb sorelzárás ezekben az időszakokban.
Mi a megoldás? Korszerű műholdvevők használata! A 2. ábra alapján jól látható, hogy a Galileo és BeiDou holdak vétele jelentősen megnöveli az elérhető műholdszámot – 26 db-ra, ugyanabban az időpontban! 26 db műhold vétele mellett a fenti jelenség nem tud bekövetkezni, messze túllépjük a minimálisan szükséges műholdszámot.
És egyúttal világítsunk is rá a Galileo és BeiDou rendszerek súlyára. Ha azt gondoljuk, hogy ezek csak úgy kiegészítésként 1-2 műholdat tudnak pluszban hozzátenni, hát tévedünk. A BeiDou holdak közül pl. a nap több időszakában akár 15-18 db is látható a választott helyen és napon. De Galileo holdakból is akár 9 db látható adott időben (3. ábra).
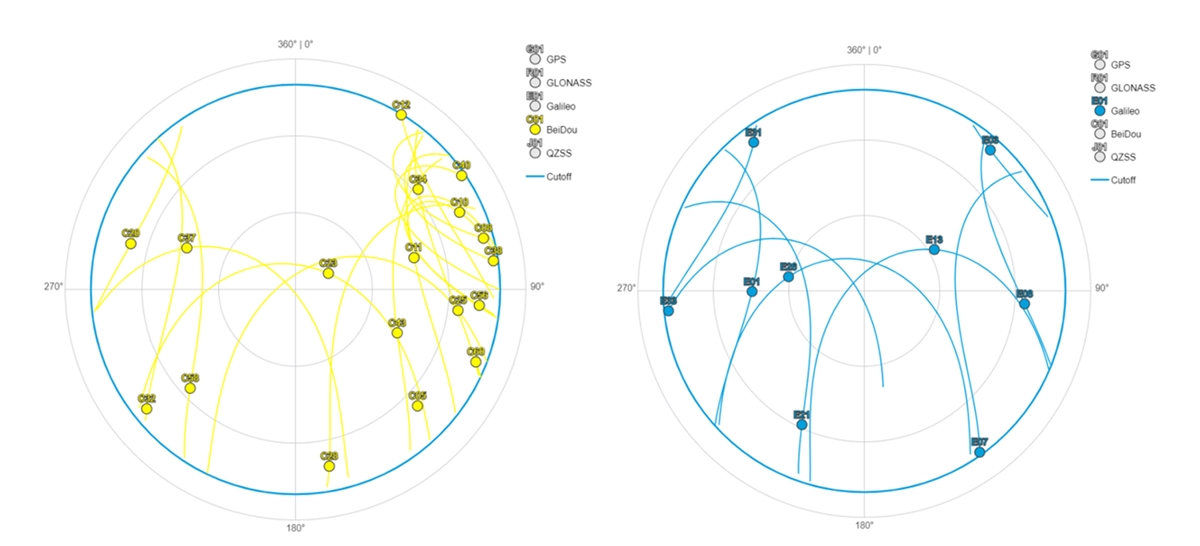
3. ábra: Elérhető BeiDou műholdak a kiválasztott helyen 10:20 perckor és Galileo holdak 18:20 perckor
A fentiek alapján nem kérdés: a biztos és pontos helymeghatározás alapja a korszerű műholdvevők használata, melyek a 4 műholdas helymeghatározó rendszer holdjait követve garantálják a folyamatos, pontos munkavégzést, a tavaszi vetésben is. Ezzel mini cikksorozatunk végéhez értünk. Bízunk benne, hogy segítségükkel rá tudtunk világítani, hogy a korszerű – ha úgy tetszik digitális mezőgazdasági – megoldások érdemben tudják segíteni a gazdálkodó munkáját.
Szöveg és kép: Dr. Mesterházi Péter Ákos, precíziós gazdálkodási csoportvezető
Úgy gondolja, a műholdas helymeghatározás mellett fontos, hogy a korrekciós jel elérése is folyamatos legyen? Önnek igaza van! De a korszerű technológia erre is kínál megoldást. Erről ITT és ITT olvashat bővebben!